Pulse Control 2 Phase Closed Loop Stepper Drive T42


ការណែនាំអំពីផលិតផល



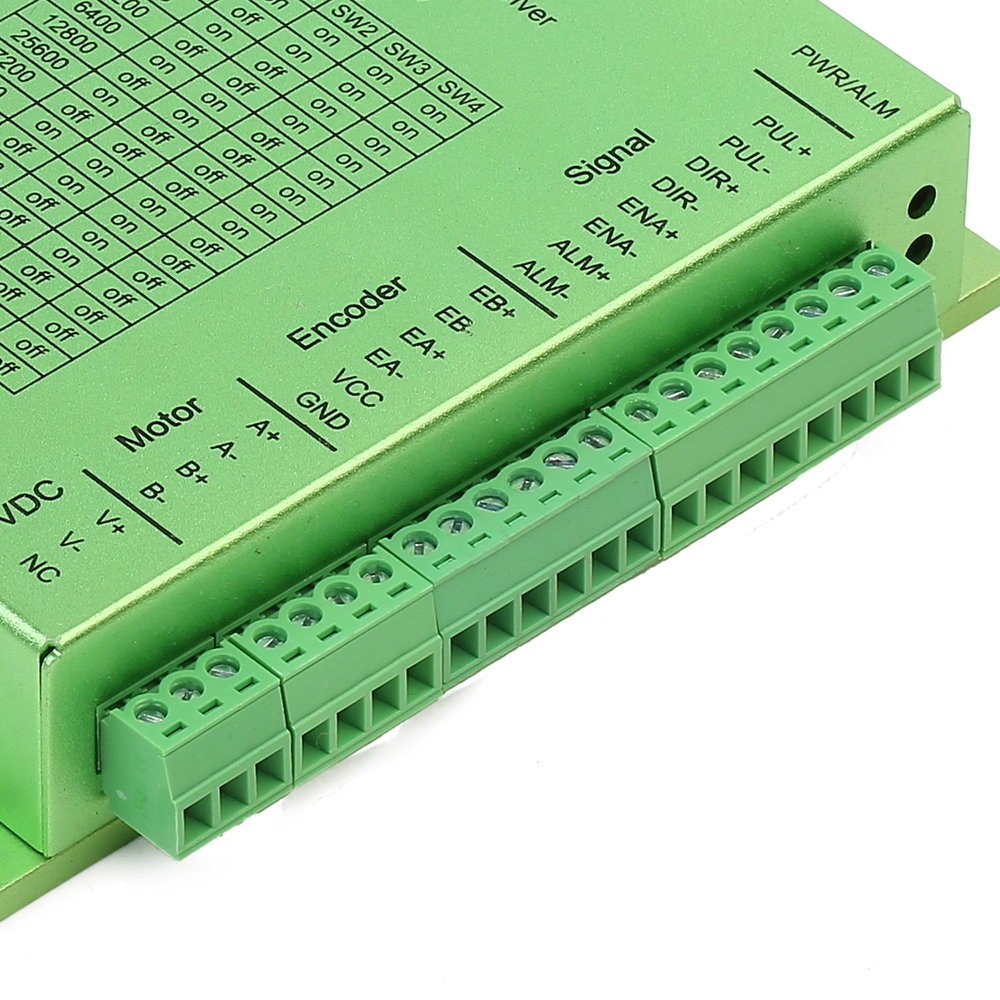
ការតភ្ជាប់

លក្ខណៈពិសេស
| ការផ្គត់ផ្គង់ថាមពល | 18–68 VDC |
| គ្រប់គ្រងភាពជាក់លាក់ | 4000 Pulse/r |
| របៀបជីពចរ | ទិសដៅ និងជីពចរ, CW/CCW ជីពចរទ្វេ |
| ការគ្រប់គ្រងបច្ចុប្បន្ន | ក្បួនដោះស្រាយគ្រប់គ្រងវ៉ិចទ័រ Servo |
| ការកំណត់ជំហានខ្នាតតូច | ការកំណត់កុងតាក់ DIP ជម្រើស 15 (ឬការកំណត់កម្មវិធីបំបាត់កំហុស) |
| ជួរល្បឿន | ធម្មតា 1200 ~ 1500rpm រហូតដល់ 4000rpm |
| ការបង្ក្រាបដោយអនុភាព | គណនាចំណុចប្រទាក់ក្រឡាដោយស្វ័យប្រវត្តិ និងរារាំងរំញ័រ IF |
| ការលៃតម្រូវប៉ារ៉ាម៉ែត្រ PID | សាកល្បងកម្មវិធីដើម្បីកែតម្រូវលក្ខណៈ PID របស់ម៉ូទ័រ |
| តម្រងជីពចរ | តម្រងសញ្ញាឌីជីថល 2MHz |
| សំឡេងរោទិ៍ | លទ្ធផលនៃការជូនដំណឹងនៃចរន្តលើសវ៉ុល កំហុសទីតាំង។ល។ |
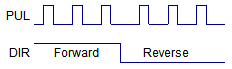
របៀបជីពចរ
ចំណុចប្រទាក់សញ្ញាកម្មវិធីបញ្ជាស៊េរី T ស្តង់ដារមានទម្រង់ជាជីពចរ ហើយ T60 អាចទទួលសញ្ញាបញ្ជាជីពចរពីរប្រភេទ។
| ជីពចរ និងទិសដៅ (PUL + DIR) |
|
| ជីពចរទ្វេ (CW + CCW) | 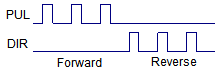 |
ការកំណត់ជំហានខ្នាតតូច
| ជីពចរ / វិ | SW1 | SW2 | SW3 | SW4 | សុន្ទរកថា |
| ៣៦០០ | on | on | on | on | កុងតាក់ DIP ត្រូវបានប្រែទៅជា "3600" ហើយកម្មវិធីសាកល្បងអាចផ្លាស់ប្តូរផ្នែករងផ្សេងទៀតដោយសេរី។ |
| ៨០០ | បិទ | on | on | on | |
| ១៦០០ | on | បិទ | on | on | |
| ៣២០០ | បិទ | បិទ | on | on | |
| ៦៤០០ | on | on | បិទ | on | |
| 12800 | បិទ | on | បិទ | on | |
| ២៥៦០០ | on | បិទ | បិទ | on | |
| ៧២០០ | បិទ | បិទ | បិទ | on | |
| ១០០០ | on | on | on | បិទ | |
| 2000 | បិទ | on | on | បិទ | |
| ៤០០០ | on | បិទ | on | បិទ | |
| ៥០០០ | បិទ | បិទ | on | បិទ | |
| ៨០០០ | on | on | បិទ | បិទ | |
| ១០០០០ | បិទ | on | បិទ | បិទ | |
| 20000 | on | បិទ | បិទ | បិទ | |
| ៤០០០០ | បិទ | បិទ | បិទ | បិទ |
-
 សៀវភៅណែនាំអ្នកប្រើប្រាស់ Rtelligent T42
សៀវភៅណែនាំអ្នកប្រើប្រាស់ Rtelligent T42